
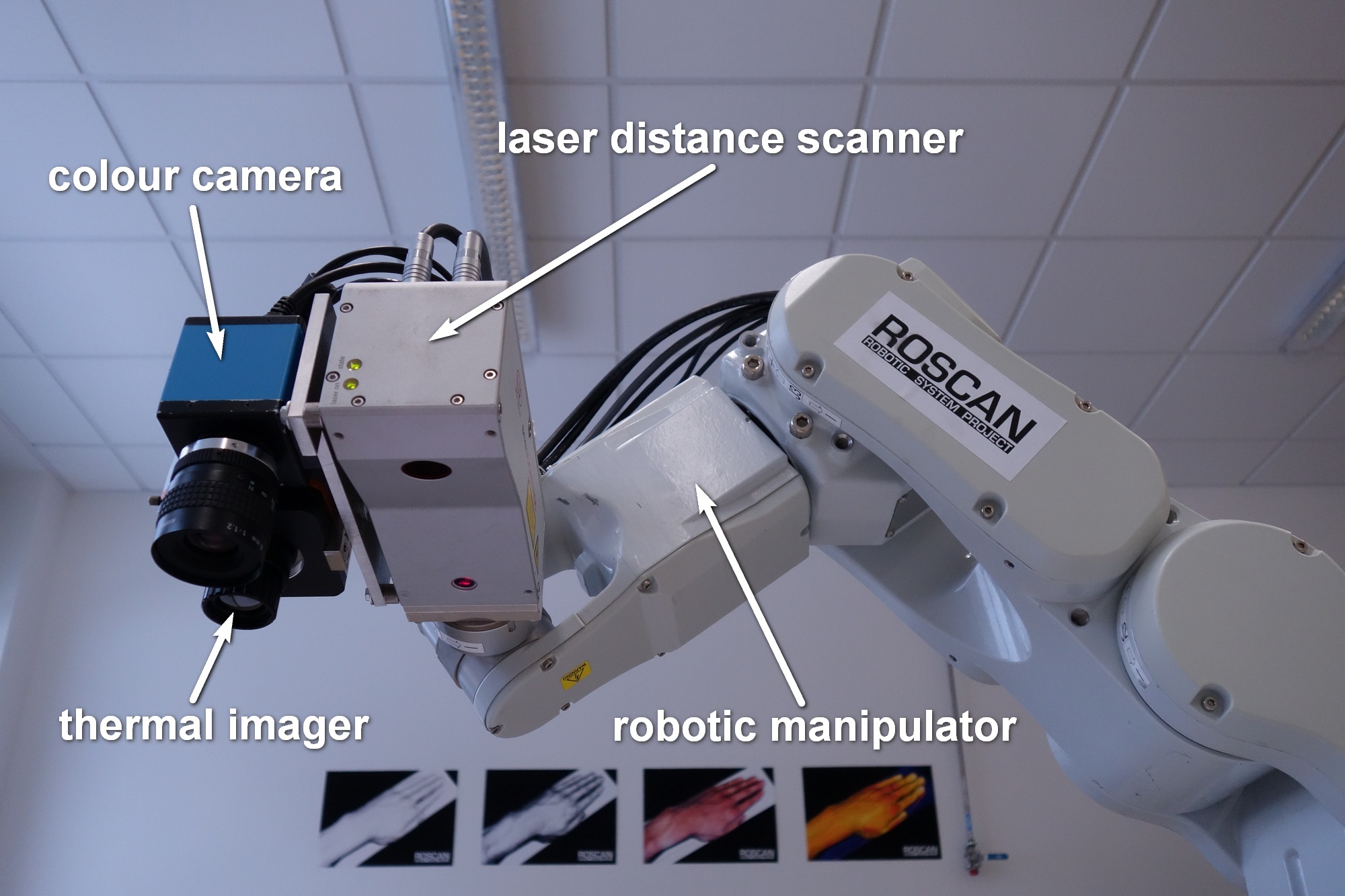
RoScan device consists of a robotic manipulator, laser line rangefinder, colour and infrared camera. All components are connected to the computer that controls the manipulator and acquires images from the sensors.
First, the robotic manipulator moves the laser rangefinder around the patient body. Because we know where the sensor is located at any moment, which direction he looks and how far the beam hit the scanned object, we can clearly determine the position of each point. We repeat it about a million times, find neighbouring points, connect them to one network and have the surface model.
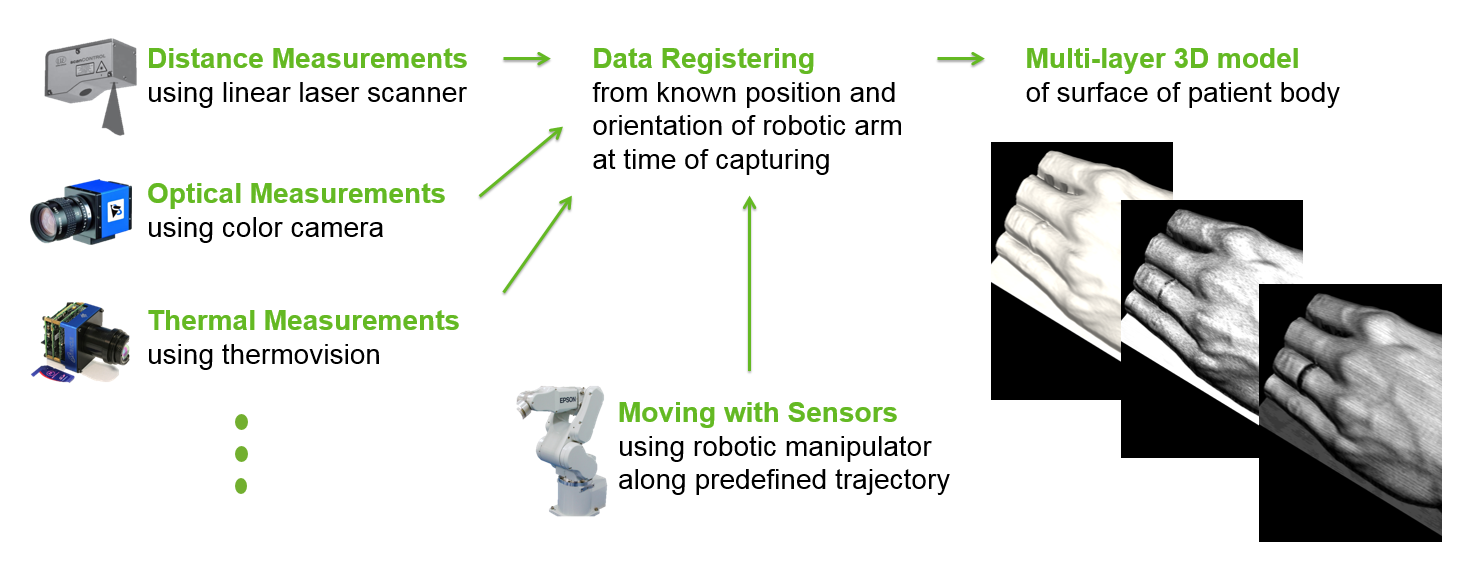
Then colour camera and infrared camera comes into play. With each of them we capture several overlapping images, again with knowledge of where the camera looks and in which direction. Using back beam projection we determine which points in the camera image are related to the corresponding points of the 3D model. The result is a multi-layer model of the object.
